| ၁။ လျှပ်စစ်မီးအားအနည်းဆုံး 160V အောက်ရောက်ရှိနေချိန်နှင့် 240V အထက်ရောက်ရှိချိန်တွင်ရေမော်တာအားအလိုအလျောက်ရပ်တန့်စေခြင်း။ |
| ၂။ ရေစုပ်ယူမည့်မြေအောက်ပိုက်လိုင်း ( သို့ ) အောက်ရေတိုင်ကီကြီးများထဲတွင်ရေမရှိလျှင်မော်တာအားမောင်းနှင်ခွင့်မပြုခြင်း။ |
| ၃။ ရေစက်စတင်မောင်းနှင်ချိန်မှ ( ၃ ) မိနစ်အတွင်းအကြောင်းတစ်ခုခုကြောင့် ( ဥပမာ ရေစက်ချို့ယွင်း၍သော်လည်းကောင်း၊ ရေပိုက်လိုင်းအတွင်းတွင်ရေမရှိ၍သော်လည်းကောင်း )ရေပိုက်ခေါင်းအထွက်မှရေကျဆင်းခြင်းမရှိပါကမော်တာအားအလိုအလျောက်ရပ်တန့်စေခြင်း။( ၃ ) မိနစ်အတွင်းရေရရှိပါကမော်တာအားဆက်လက်မောင်းနှင်ခွင့်ပြုခြင်း။ |
| ၄။ အကယ်၍ ( ၃ )မိနစ်စောင့်ဆိုင်းပြီးချိန်ထိရေမရရှိပါကမော်တာအားရပ်တန့်စေ၍နောက်ထပ်မိနစ်( ၃၀ )အကြာတွင်မော်တာအားပြန်လည်မောင်းနှင်စေပြီး( ၃ )မိနစ်ထပ်၍စောင့်ဆိုင်းကြည့်ရှု့စေခြင်း ( အဆိုပါပြုလုပ်ချက်ကိုနာရီဝက်လျှင်တစ်ကြိမ်ကျမှန်မှန်ပြုလုပ်နေစေခြင်း ) |
| ၅။ အိမ်ပေါ်မှရေတိုင်ကီအတွင်းတွင်လျှပ်စစ်အာရုံခံပစ္စ္စည်းများ ( electronic sensors )ထည့််သွင်းတပ်ဆင်ပေးထားသည့်အတွက်တိုင်ကီအတွင်းမှရေသည်ရေလျှံသည့်အာရုံခံအမှတ်အရောက်တွင်မော်တာအားအလိုအလျောက်ရပ်တန့်စေခြင်း။
|
| ၆။ အပေါ်ရေတိုင်ကီမှရေသည်သတ်မှတ်ထားသည့်အမှတ်အောက်အရောက်တွင်မော်တာအားအလိုအလျောက်စတင်မောင်းနှင်စေခြင်းစသည့်နည်းစနစ်တို့ကိုခေတ််မီ ( electronic sensors ) များကိုအသုံးပြုပြီးတီထွင်ထုပ်လုပ်ထားခြင်းဖြစ်သည့်အတွက်စိတ်ချစွာအသုံးပြုနို်င်ပါသည်။ |
| တပ်ဆင်မှု |
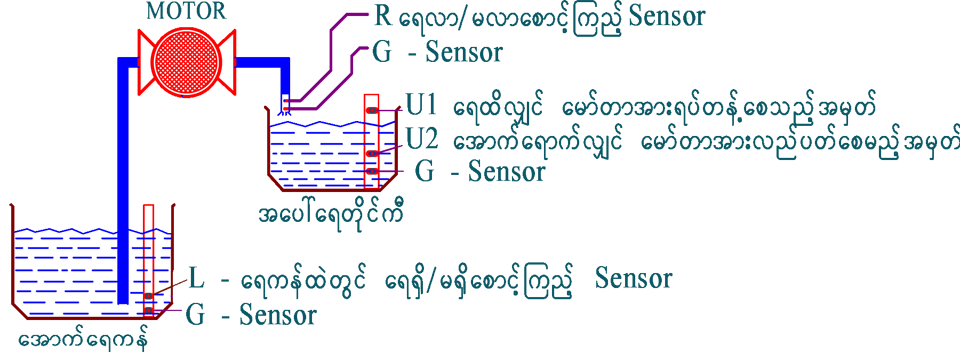
| Sensor U1 |
= ၄င်းကိုရေတိုင်ကီ၏နှုတ်ခမ်းမှရေပြည့်စေလိုသည့်အမြင့်ဆုံးအကွာအဝေးတွင်တပ်ဆင်ပါ။ရေဖြည့်နေစဉ်အမှတ် U1 ကိုရေလာထိသည့်အချိန်၌မော်တာအားအလိုအလျောက်ရပ်တန့်စေလိမ့်မည်။ |
| Sensor U2 |
= ၄င်းကိုအပေါ်ရေတိုင်ကီ်၌ရေနည်းနေ၍မော်တာစတင်မောင်းနှင်စေလိုသောအမှတ်နေရာတွင်တပ်ဆင်ပါ။ရေသည် U2 အမှတ်အောက်ရောက်ရှိချိန်တွင်မော်တာအားအလိုအလျောက်စတင်မောင်းနှင်စေလိမ့်မည်။( ဥပမာ - ရေတိုင်ကီမှရေ 5" ခန့်လျော့သည်နှင့်ရေတင်စေလိုပါက U2 ကို U1၏အောက် 5" အကွာတွင်တပ်ဆင်ပါ။ ) |
| Sensor G |
= ၄င်းကို U2 ၏အောက် 2" အကွာတွင်တပ်ဆင်ပါ။ |
| Sensor R နှင့် G |
= ၄င်းနှစ်ခုကိိုုအပေါ်ရေတိုင်ကီ်ထဲသို့ရေဖြည့်သည့်ရေပိုက်၏ထိပ်ဝတွင်တပ်ဆင်ပါ။၄င်း sensor များကသာရေလာ၊ မလာကို(၃)မိနစ်စောင့်ကြည့်ပြီးရေမလာပါကမော်တာအားရပ်တန့်စေခြင်း၊ ရေရရှိပါကမော်တာကိုဆက်လက်မောင်းနှင်ခွင့်ပြုခြင်း တို့ကိုပြုလုပ်ပေးလိမ့်မည်။ယင်းရေပိုက်၏ထိပ်ဝတွင် G နှင့် R Sensor ကိုတစ်ခုနှင့်တစ်ခု 1" အကွာတွင်တပ်ဆင်ပါ။( မော်တာရပ်တန့်နေသောအချိန်တွင်ရေထိနေမည့်နေရာတွင်Sensorကိုမတပ်ဆင်ရပါ ) |
| Sensor L နှင့် G |
= ၄င်းနှစ်ခုကို အောက်ရေတိုင်ကီထဲတွင် ရေရှိမရှိကို သိရှိစေရန် တပ်ဆင်ရခြင်းဖြစ်သည်။Sensor ကို အောက်ရေတိုင်ကီတွင် မိမိတပ်ဆင်လိုသည့် အနိမ့်ဆုံးရေ Levelတွင် တပ်ဆင်ရမည်။ ၄င်း sensor နှင့် ရေထိနေသရွေ့ မော်တာအားကို မောင်းနှင်နိုင်ပြီး ယင်းနှင့်ရေလွတ်သွားသည်နှင့် မော်တာအားမောင်းနှင်ခြင်းမပြုတော့ပေ။ Sensor L ကို G ၏အပေါ် ၁”ခန့်အကွာတွင် ထားရှိရမည်။ သို့သော် စည်ပင်ပိုက်လိုင်းဆိုပါက Sensor ထည့်ရန်မဖြစ်နိုင်၍သော်လည်းကောင်း၊ Ground Tank ပါရှိသော်လည်း Sensor ထည့်ရန် အဆင်မပြေ၍သော်လည်းကောင်း၊ Pump Controller ရှိ connector တွင် G နှင့် L ကို ဝါယာကြိုးဖြင့် ဆက်သွယ်ပေးလိုက်ပါက ကျန် Function များအားလုံး ပုံမှန်အလုပ်လုပ်ပေးပါလိမ့်မည်။ |
| Semi-Auto ( S/W ) |
= မော်တာကို အရေးတကြီးမောင်းနှင်လိုသည့်အခါတွင် S/W ကိုတစ်ချက်နှိပ်ပြီး ပြန်လွှတ် လိုက်ပါ။S/W နှိပ်ပြီး ၅ Sec အကြာတွင် မော်တာစတင် မောင်းနှင်ပြီး အပေါ်ရေတိုင်ကီ တွင် ရေလျှံသည့် အခါတွင် အလိုအလျောက် ပြန်ပိတ်ပေးသွားမည်ဖြစ်သည်။ |
| မှတ်ချက် |
ရေစက်ထိန်းချုပ်သည့် နည်းစနစ် ပုံမှန်အလုပ်လုပ်ခြင်းမရှိပါက ရေထဲတွင်ထည့်ထားသည့် Wire ကြိုးထိပ်ရှိ Sensor များမှ ရေညှိ၊ ချေးညှိများကို Brush ဖြင့် တိုက်ချွတ်ဆေးကြော ပေးရန်လိုအပ်ပါသည်။ |